Bismillah. Kali ini saya berada dalam situasi yang mengharuskan saya meninjau kembali pemahaman terkait dengan sudut Euler dan matriks rotasi. Hasil reviewnya saya tuliskan secara singkat di sini, mudah2an dapat bermanfaat untuk rekan2 yang mengalami situasi yang sama.
DEFINISI: SUDUT EULER
Sudut Euler adalah istilah untuk menyebut sudut rotasi (ϕ,θ,ψ) yang diperlukan untuk berpindah dari satu sistem koordinat ke sistem koordinat yang lain.
Misalnya, ada sistem koordinat benda dan sistem koordinat bumi. Koordinat bumi digunakan sebagai kerangka acuan (Inertial Frame). Koordinat benda mengalami perputaran dengan urutan rotasi Yaw-Pitch-Roll terhadap bumi. Maka perhitungan transformasi koordinatnya dapat dinyatakan sebagai berikut
Sudut Euler adalah istilah untuk menyebut sudut rotasi (ϕ,θ,ψ) yang diperlukan untuk berpindah dari satu sistem koordinat ke sistem koordinat yang lain.
Misalnya, ada sistem koordinat benda dan sistem koordinat bumi. Koordinat bumi digunakan sebagai kerangka acuan (Inertial Frame). Koordinat benda mengalami perputaran dengan urutan rotasi Yaw-Pitch-Roll terhadap bumi. Maka perhitungan transformasi koordinatnya dapat dinyatakan sebagai berikut
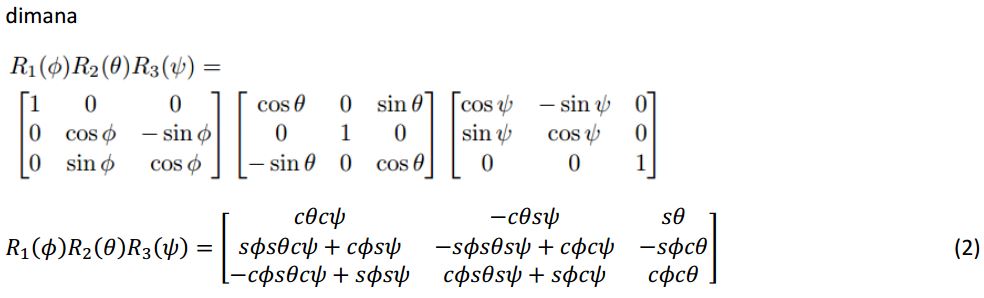
Vb=R1(ϕ).R2(θ).R3(ψ).Ve (1)
dimana R1(ϕ), R2(θ), R3(ψ) adalah matriks rotasi roll, pitch, dan yaw.

TRANSFORMASI ROTASI KOORDINAT BUMI KE KOORDINAT BENDA
Untuk mentransformasi sebuah vektor dari
Koordinat Bumi (Earth) ⇒ Koordinat Benda (Body)
dengan urutan rotasi Yaw-Pitch-Roll terhadap bumi, Komposisi Matriks Rotasinya adalah
Vb=R1(ϕ).R2(θ).R3(ψ).Ve
TENTANG URUTAN ROTASI
Dalam merumuskan komposisi matriks rotasi, urutan rotasi sangat penting dan menentukan. Misalnya, kali ini, koordinat benda mengalami perputaran dengan urutan rotasi Roll-Pitch-Yaw terhadap koordinat bumi. Maka perhitungan transformasi koordinatnya dapat dinyatakan sebagai berikut
Vb=R3(ψ).R2(θ).R1(ϕ).Ve (3)
Coba bandingkan dengan urutan rotasi Yaw-Pitch-Roll dalam persamaan (1). Saya iseng2 menghitung perkalian matriks rotasi tersebut hingga saya dapatkan

SIFAT KHAS MATRIKS ROTASI
Matriks Rotasi R memiliki sifat khusus yaitu inversnya sama dengan transposenya
inv(R)=transp(R)
Alasannya, determinan matriks rotasi selalu bernilai 1.
TRANSFORMASI ROTASI KOORDINAT BENDA KE KOORDINAT BUMI
Sekarang, bagaimana apabila diperlukan transformasi sebaliknya, yaitu dari koordinat benda ke koordinat bumi.
Sekarang, bagaimana apabila diperlukan transformasi sebaliknya, yaitu dari koordinat benda ke koordinat bumi.
Koordinat Benda (Body) ⇒ Koordinat Bumi (Earth)
Misalnya, transformasi koordinat bumi ke koordinat benda dinyatakan sebagai berikut
Vb=R3(ψ).R2(θ).R1(ϕ).Ve
Maka, transformasi koordinat benda ke koordinat bumi didapatkan dengan inversi matriks rotasi
Ve=inv(R3(ψ).R2(θ).R1(ϕ)).Vb
Dengan kaidah perhitungan matriks dan sifat khas matriks rotasi, kita dapatkan
inv(R3(ψ).R2(θ).R1(ϕ))=inv(R1(ϕ)).inv(R2(θ)).inv(R3(ψ))
=transp(R1(ϕ)).transp(R2(θ)).transp(R3(ψ))
=transp(R3(ψ).R2(θ).R1(ϕ))
=transp(R3(ψ).R2(θ).R1(ϕ))
Saya tidak sempat menghitung matriksnya, tapi saya ada pustaka yang memverifikasi bahwa
inv(R3(ψ).R2(θ).R1(ϕ))=transp(R3(ψ).R2(θ).R1(ϕ))
Dengan kata lain, matriks rotasi inv(R3(ψ)R2(θ)R1(ϕ)) adalah transpose dari persamaan (4).
KESIMPULAN
Saya kira kesimpulan pokok buat saya dari review ini adalah bahwa Transformasi Rotasi:
Koordinat Bumi (Earth) ⇒ Koordinat Benda (Body)
Vb=R3(ψ).R2(θ).R1(ϕ).Ve
Koordinat Benda (Body) ⇒ Koordinat Bumi (Earth)
Koordinat Benda (Body) ⇒ Koordinat Bumi (Earth)
Ve=transp(R3(ψ).R2(θ).R1(ϕ)).Vb
PENUTUP
Formatika penulisan matematik yang lebih baik dapat dilihat di versi PDF:
https://www.researchgate.net/publication/321225062_Memahami_Sudut_Euler_dan_Matriks_Rotasi
Sekian dulu. Bila artikel ini dirasa bermanfaat, mohon saya didoakan yang baik2 dalam hati atau dibacakan al-Faatihah. Maturnuwun. Alhamdulillah.
https://www.researchgate.net/publication/321225062_Memahami_Sudut_Euler_dan_Matriks_Rotasi
Sekian dulu. Bila artikel ini dirasa bermanfaat, mohon saya didoakan yang baik2 dalam hati atau dibacakan al-Faatihah. Maturnuwun. Alhamdulillah.
REFERENSI
[1] https://en.wikipedia.org/wiki/Euler_angles
[2] https://en.wikipedia.org/wiki/Rotation_matrix
[3] 6-DOF Equations of Motion, Matthew M. Peet, Illinois Institute of Technology
[2] https://en.wikipedia.org/wiki/Rotation_matrix
[3] 6-DOF Equations of Motion, Matthew M. Peet, Illinois Institute of Technology
No comments:
Post a Comment