Tulisan ringkas ini menjelaskan model matematik enam derajat kebebasan (six degree of freedom) suatu titik massa dalam frame Earth-Centered Earth Fixed.
Enam derajat kebebasan adalah tiga gerak translasi (X, Y, Z) dan tiga gerak rotasi (Roll, Pitch, dan Yaw).

Maksud dari Earth-Centered Earth Fixed (ECEF) adalah model matematik dalam tulisan ini menggunakan Bumi elips dan berotasi sebagai koordinat acuan.
Model matematik ini disusun berdasarkan dokumentasi MATLAB tentang blok Simulink 6-DOF ECEF Quaternion.
Vektor gaya gravitasi dalam koordinat North-East-Down (NED)

Vektor kecepatan translasi dalam koordinat Body

Vektor kecepatan rotasi dalam koordinat Body

Sudut serang (angle of attack)

Matriks transformasi koordinat ECEF ke koordinat North-East-Down (NED)

Matriks transformasi koordinat NED ke koordinat Body
Kecepatan angin dalam koordinat NED

Kecepatan angin dalam koordinat Body
Kecepatan titik massa yang dipengaruhi angin
Gaya yang bekerja pada titik massa, dalam koordinat Body

dimana S adalah luas penampang, CFX dan CFZ adalah koefisien aerodinamik di sumbu X dan Z.
Momen yang bekerja pada titik massa, dalam koordinat Body

dimana d adalah diameter, α sudut serang, dan CMYα adalah koefisien aerodinamik pitch.
Tekanan udara bebas

Matriks inersia titik massa dan turunannya

Vektor kecepatan rotasi Bumi dalam koordinat ECEF

Persamaan state untuk kecepatan sudut
Persamaan state untuk kecepatan translasi

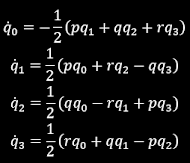
Persamaan state untuk quaternion
Persamaan state untuk posisi dalam koordinat ECEF
REFERENSI
No comments:
Post a Comment